|
|
|
|
Testo e foto di Raffaele Ciotti |
|
|
|
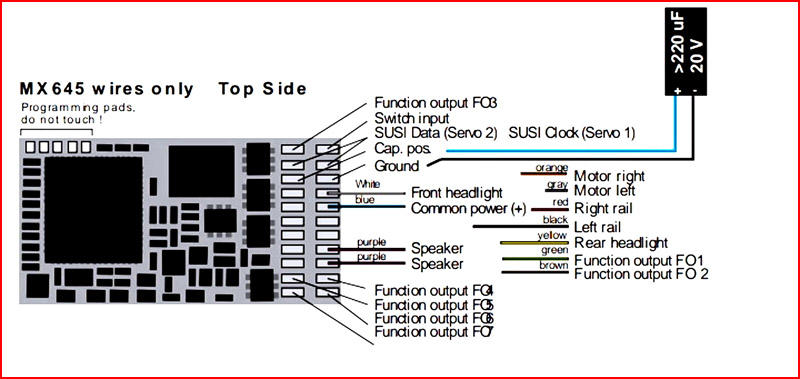
La ALn 668 è stata, per me, l’automotrice a nafta più amata, forse per via dei suoi colori vivaci e contrastanti, ma anche (e soprattutto) perché collegando Roma con Viterbo e fermando in varie stazioni, svolgeva un servizio di metropolitana nella zona nord della Capitale, utilissima per evitare il caotico traffico cittadino; inoltre la partenza e il ritorno venivano effettuati dalla stazione Termini, al centro della città, comodissimo punto di snodo per qualsiasi direzione si desiderasse poi prendere. Avendone (ovviamente!) acquistati i modelli della motrice e relativa rimorchiata, sono rimasto colpito dalla fattura molto ben dettagliata associata ad un costo contenuto, e soddisfatto anche dal comportamento su rotaia; vi era però qualcosa che non mi appagava completamente ed era la mancanza del tipico borbottio del motore di questo simpatico trenino. Ho perciò deciso di colmare questa lacuna acquistando un decoder DCC sonoro programmato da Portigliatti con i suoi tipici suoni e rumori, uno Zimo 645/Fs_ALn668. La prima cosa da fare, dopo aver aperto i modelli, è quella di eliminare tutti i collegamenti tra ruote, motore, luci, diodi ecc. in quanto dovranno essere collegati tutti al decoder seguendo attentamente lo schema e le istruzioni accluse; per maggiore chiarezza e comprensione onde evitare errati e fatali collegamenti, si riassume l’esatta cablatura: filo rosso (rotaia destra); filo nero (rotaia sinistra); filo arancione (motore terminale destro); filo grigio (motore terminale sinistro); filo bianco (luci anteriori); filo giallo (luci posteriori); coppia fili porpora (altoparlante); filo verde (3° faro); filo marrone disponibile per altre funzioni (es. luce cabina…); filo blu (positivo comune a tutte le funzioni). Ad esempio, per le luci anteriori si useranno i fili bianco e blu, per il 3° faro il verde e il blu…ecc.
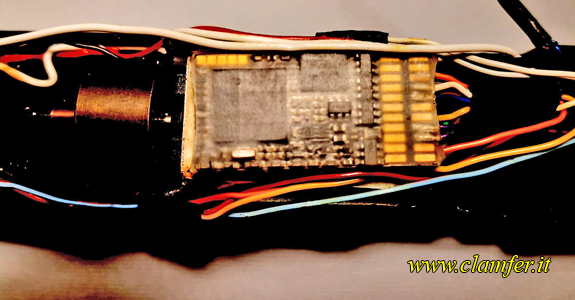
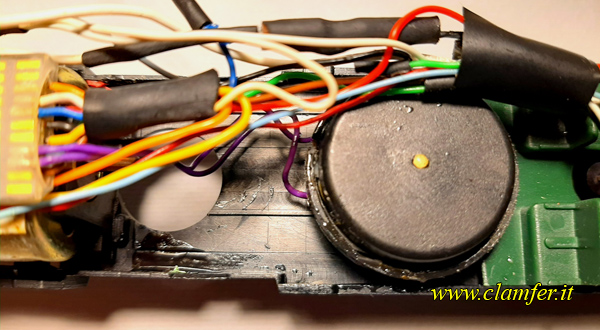
Schema dei collegamenti del decoder con indicazione dei colori dei fili. Ricordo che, prudenzialmente occorrerà inserire tra le uscite per i fari (incluso il 3°) ed i LED, una resistenza da 1 kohm. Ho incollato il decoder (che a sua volta è protetto da un tubetto termorestringente trasparente) sulla superficie piana del motore, in modo da essere posizionato verso il centro del rotabile e, quindi, per poter gestire al meglio i cablaggi diretti nelle varie parti del modello. Un altro miglioramento che ho adottato è stato quello di sostituire le grandi lampade bianche e rosse con due piccoli c.s. che recano saldati, in corrispondenza dei fanali, due duo LED smd bianco caldo/rosso con anodo in comune (tipo 605) adattissimi ad essere pilotati, tramite una resistenza da 1 kohm direttamente dal decoder, il quale ha, come già detto, il filo comune di tutte le sue funzioni il positivo (+), di colore blu.
Il decoder montato sul motore, e ...
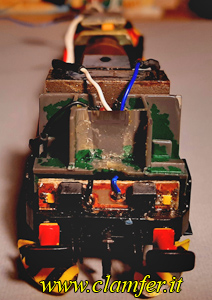
... circuito stampato con duo led smd bianco caldo/rosso. Per illuminare il 3° faro (filo verde), bisogna innanzitutto dividere il trasparente che lo unisce ai fari e renderlo così indipendente dalla luce di questi; un piccolo LED smd a luce bianca provvederà alla sua illuminazione, ricordando di interporre anche in questo caso, una resistenza tra il filo verde ed il LED da 1 kohm. Per avere la possibilità di smontare e dividere il telaio dalla carrozzeria, il 3° faro viene collegato al decoder tramite un micro connettore.
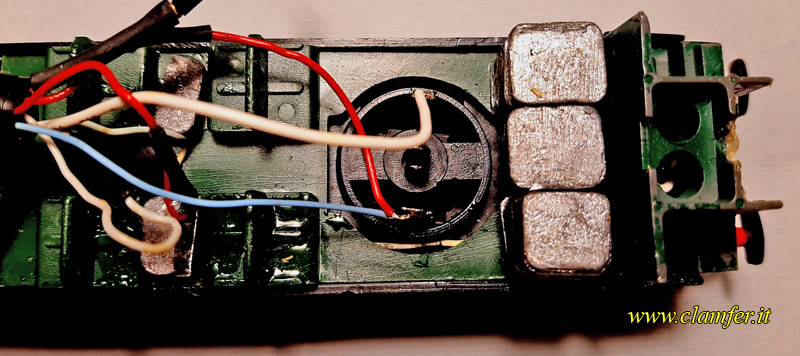
3° Faro con relativo LED smd e micro connettore. L’altoparlante con la sua cassa di risonanza verrà incollato al piano del telaio; a tal proposito preciso di aver rimosso la trasmissione del secondo albero cardanico per far posto ad esso, e di aver opportunamente appesantito tramite dei piombi il carrello portante onde assicurarne la stabilità e la buona presa di corrente.
Altoparlante con cassa di risonanza.
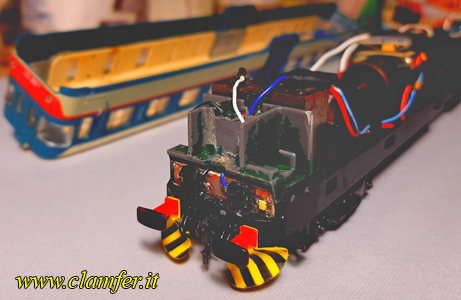
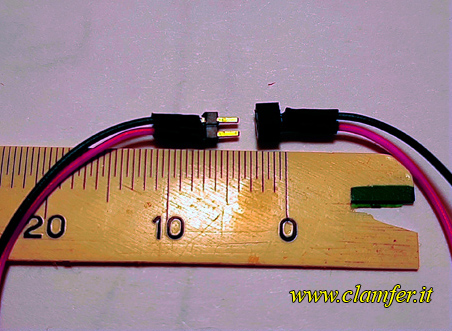
Piombi per appesantimento sul carrello folle. Qualora si desideri agganciare anche la rimorchiata, occorre portare ad essa la tensione per le luci (ricordo che sono pilotate dal decoder situato sulla motrice) tramite 3 conduttori che, all’occorrenza, possano essere sganciati nel caso di motrice isolata. Essi sono stati realizzati ricorrendo a 3 minuscole boccole sia sulla motrice che sulla rimorchiata, e 3 cavetti muniti di spinotti maschio/maschio che, una volta collegati tra i due rotabili, illumineranno le luci della rimorchiata simulando i tubi dell’aria, mentre nel caso di motrice isolata, le boccole accoglieranno il gancio e le condotte dell’aria modellistiche.
Le boccole inserite sulla motrice e cavetti maschio/maschio.
Boccole sulla rimorchiata con un cavetto inserito e loro utilizzo per motrice isolata. Grazie allo speciale algoritmo dell’alimentazione del motore generato dal decoder, la marcia è incredibilmente reale, con la tipica esitazione alla partenza che si riscontra nella realtà di queste automotrici; inoltre, tramite le CV (variabili di configurazione), dalla 2 alla 5 si possono regolare velocità minima e massima, accelerazione, velocità media, frenatura, ecc. Per scegliere i valori più adatti al nostro modello, essendo il decoder a 8 bit, ogni CV dispone di un range di 256 gradini, mediante i quali potremo avere una migliore accuratezza nella definizione dei loro parametri. Dal manuale d’istruzioni si possono dedurre su quali CV intervenire per condizionare il funzionamento delle varie funzioni e tramite esse potremo variare, ad esempio, il volume del suono, l’intensità delle luci, ecc. in maniera molto semplice e per tutte le applicazioni svolte dal decoder stesso. Rammento che, da fabbrica, l’indirizzo standard di ogni decoder DCC per richiamare la locomotiva è CV1=3; in un tempo successivo, avendo in nostro possesso più locomotive/locomotori, dovremo assegnare loro degli indirizzi (CV1) diversi ed univoci per poterli richiamare in maniera indipendente uno dall’altro e ovviamente ogni modello, a seconda della sua natura (a vapore, diesel o elettrica), dovrà avere i propri parametri opportunamente memorizzati sul proprio indirizzo. Il risultato di queste interessanti modifiche mi è sembrato molto buono, ora finalmente la “Micetta” oltre al movimento molto più performante ed aderente alla realtà, possiede anche i suoi tipici suoni, grazie ai quali si è ampliata la sensazione di realtà nei nostri plastici (v. Video). Sperando di essere stato sufficientemente chiaro, ringrazio i lettori dell’attenzione, rimandando chi volesse approfondire l’argomento CV ai molteplici siti internet che lo trattano. |
|
cliccare sulla icona per visionare il filmato |
|
|