|
| |||
|
Testo e foto di Antonio Gamboni |
|||
|
Ricordate il film “Il ponte sul fiume Kwai”? Durante la seconda guerra mondiale, il colonnello inglese Nicholson viene catturato con i suoi uomini e rinchiuso in un campo di prigionia giapponese agli ordini del comandante Saito. L’ufficiale inglese, dopo aver subìto lunghe torture, accetta di dirigere i propri uomini nella costruzione di un ponte ferroviario sul fiume Kwai, ponte che i giapponesi non erano riusciti a realizzare. Ovviamente la collaborazione è vista addirittura come tradimento; però non è così per Nicholson che “vede nella realizzazione di quest’opera una dimostrazione della superiorità della bravura tecnica inglese rispetto a quella dei giapponesi”. Ma quale nesso vi è tra l’argomento di queste note ed il ponte sul fiume Kwai?
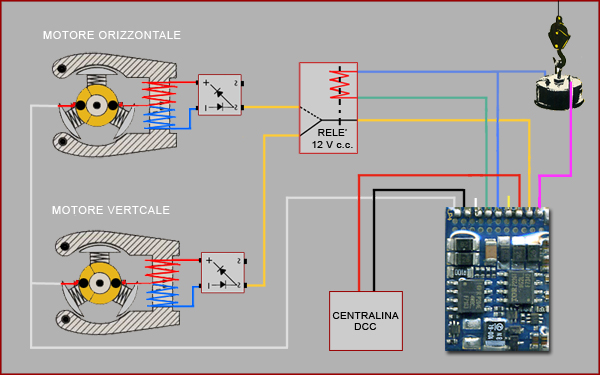
Negli anni ’60 del secolo passato la Maerklin mise in catalogo (art. 7051) una gru elettromeccanica telecomandata che, equipaggiata con due motori, ha una cabina rotante sul piano orizzontale ed un gancio mobile nel piano verticale; inoltre a detto gancio è sospesa un’elettrocalamita che, se alimentata, attrae corpi metallici. L’intero meccanismo è pilotato da una scatola di comando collegata con un cavetto a sei fili e con ben sei pulsanti: due per il movimento verticale (su e giù), due per quello orizzontale (sinistra e destra) e due per attivazione e spegnimento dell’elettromagnete. Prima di procedere allo smontaggio della gru ed alla sistemazione dei componenti elettronici, analizziamo con l’ausilio della sottostante figura come funziona la nostra applicazione. Come noto, i motori Maerklin funzionano in corrente alternata ed invertono il moto alimentando l’uno o l’altro avvolgimento dello statore. Tali avvolgimenti, che hanno verso contrario e ciascuno di essi è in serie con le bobine del rotore, vengono commutati dal noto relè funzionante con sovratensione. Poiché i citati motorini funzionano anche in corrente continua se il campo magnetico dello statore resta invariato, ci serviamo di un semplice stratagemma per avere lo stesso risultato. Se colleghiamo due diodi contrapposti ai lati liberi delle bobine dello statore, come indicato in figura, quando si inverte il verso della corrente viene alimentata l’una o l’altra e, poiché esse sono avvolte in senso contrario, il campo generato resta costante, proprio come se avessimo adoperato un magnete permanente. Per semplicità di montaggio, ho sfruttato solo due diodi di un ponte raddrizzatore dalle ridotte dimensioni. Così modificati i due motori Maerklin possono funzionare con alimentazione DCC. Sorge ora il problema di alimentare l’uno o l’altro dei citati motori. La soluzione è alquanto semplice: un microrelè a semplice scambio ed alimentato a 12 V da collegarsi come in figura eccitato con l’uscita AUX1 (filo verde del decoder). Infine non resta che collegare l’elettrocalamita di sollevamento con il filo viola del decoder (AUX2).
Schema di funzionamento e di montaggio del decoder. E veniamo alla trasformazione. Prima di smontare il traliccio dalla base, staccare i due fili che collegano il magnete alla cabina in modo da non danneggiarlo durante la modifica; quindi procedere alla saldatura dei due ponti raddrizzatori (come in figura) e ad isolare dalla carcassa metallica (massa) sia uno dei carboncini che le bobine dello statore. L’operazione va eseguita per ciascuno dei due motori.
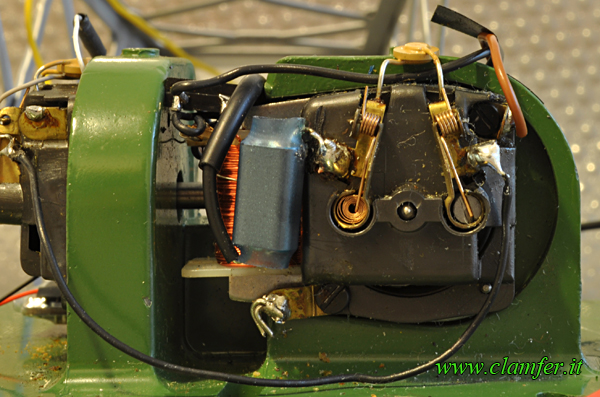
Un motore visto di lato. Si noti il capocorda di massa dissaldato.
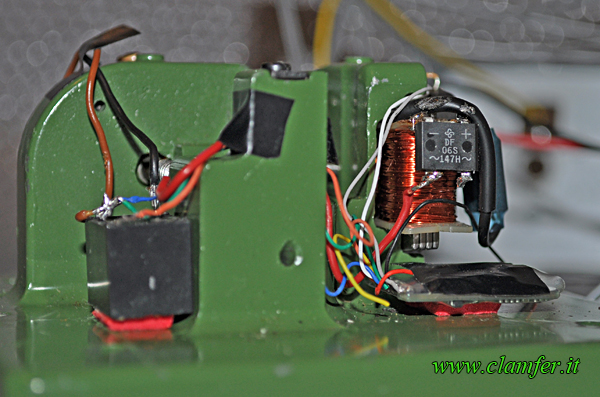
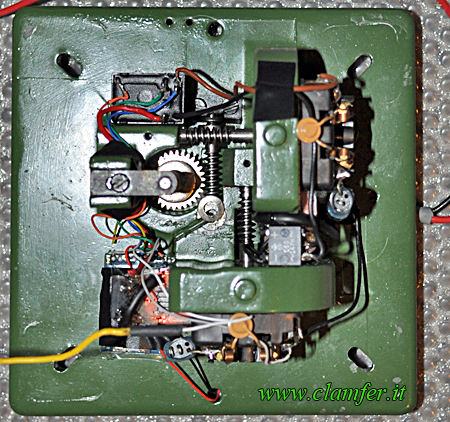
Sulla sinistra il microrelè e, a destra, il piccolo ponte raddrizzatore saldato su un motore. Sotto lo statore, è stato alloggiato il decoder fissato alla base con il biadesivo (rosso nella foto). Seguendo lo schema, saldare i fili del decoder ai vari componenti. L’ultima operazione è quella del collegamento del magnete di sollevamento. Poiché uno dei fili è collegato alla struttura metallica della gru, occorre isolarlo.
La piattaforma della gru come si presenta a trasformazione ultimata e prima del montaggio dell’infrastruttura superiore. A montaggio ultimato, passiamo al collaudo della gru mediante i seguenti comandi: con la manopola della velocità e direzione di marcia pilotiamo il motore selezionato mediante il tasto funzione F1 (AUX1), vale a dire rotazione in un verso o nell’altro sul piano orizzontale o salita e discesa del gancio nel piano verticale. Per la presa di un oggetto metallico non resta che azionare il tasto funzione F2 (AUX2). |
|||
|
|